
👋 I am a PhD candidate at the UCLA Mobility Lab of the University of California, Los Angeles (UCLA), advised by Prof. Jiaqi Ma. I am also a research intern at Motional, and a incoming research intern at NVIDIA Research. I received my master’s degree from Tongji University with the honor of Shanghai Outstanding Graduate, advised by Prof. Yanjun Huang and Prof. Zhuoping Yu.
My research focuses on the scene understanding and reasoning of autonomous systems, which enables vehicles/robots to intelligently interact and cooperate with others. Currently, I am exploring the Vision-Language-Action (VLA) models and closed-loop simulation in this domain. My research is supported by Amazon AI PhD Fellowship.
🔥 News
- 2026.05: 👏 Our MDrive paper on closed-loop cooperative driving has been released! Join our MDrive Challenge in CVPR 2026!
- 2026.04: 👏 Our SpanVLA paper on eficient action bridging and learning from negative-recovery samples for VLA has been released!
- 2025.10: 🎉 Our V2XPnP paper won the Best Paper Award (1st) at the ICCV 2025 DriveX Workshop!
- 2025.09: 🎉 I am honored to be selected as an Amazon AI PhD Fellow for 2025, and received the Amazon AI PhD Fellowship.
- 2025.09: 👏 Our AutoVLA paper on the VLA model for end-to-end autonomous driving has been accepted by NeurIPS 2025!
- 2025.06: 👏 Our V2XPnP and TurboTrain paper on the end-to-end multi-task framework for multi-agent multi-frame system and the efficient & balanced multi-task learning strategies for the system have been accepted by ICCV 2025!
- 2025.01: 👏 Our Co-MTP paper on cooperative prediction framework with multi-temporal fusion has been accepted by ICRA 2025.
- 2024.08: 🎉 Our survey paper on trajectory prediction has been awarded as Best Paper Award for Outstanding Survey of IEEE T-IV!
- 2024.07: 👏 Our V2X-Real paper on multi-agents and multi-modal cooperative perception has been accepted by ECCV 2024.
- 2023.06: 🎉 Shanghai Outstanding Graduate Honor!
📝 Selected Publications | See All Publications > | *: Equal Contributions, ‡: Project Leader
SpanVLA: Efficient Action Bridging and Learning from Negative-Recovery Samples for Vision-Language-Action Model
Zewei Zhou*, Ruining Yang*, Tony Qi, Yiluan Guo, Sherry X. Chen, Tao Feng, Kateryna Pistunova, Yishan Shen, Lili Su, Jiaqi Ma
 |
|  |
|

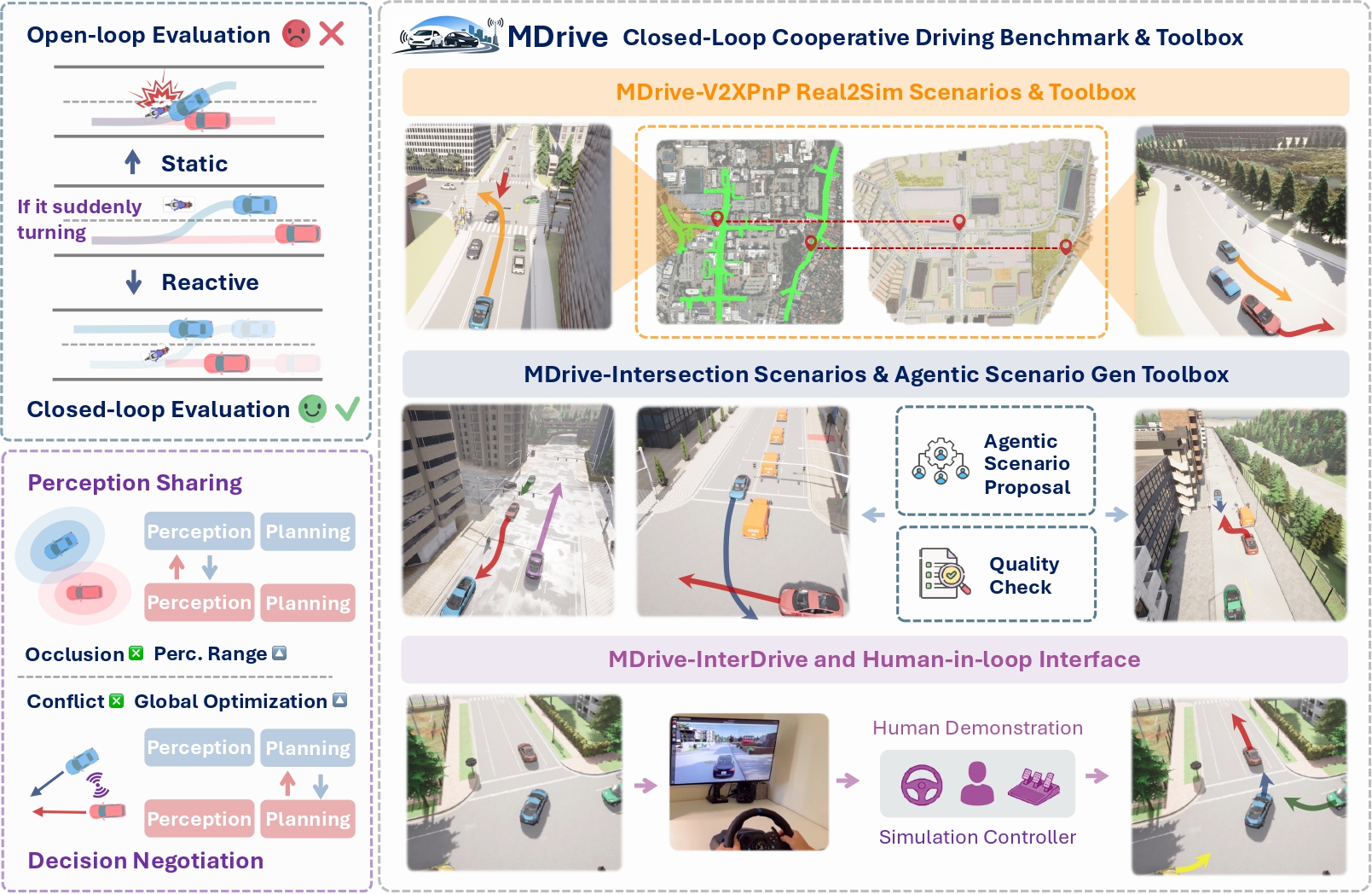
MDrive: Benchmarking Closed-Loop Cooperative Driving for End-to-End Multi-agent Systems
Marco Coscoy*, Zewei Zhou*‡, Seth Z. Zhao*‡, Henry Wei, Angela Magtoto, Johnson Liu, Rui Song, Walter Zimmer, Zhiyu Huang, Chen Tang, Bolei Zhou, Jiaqi Ma
| |

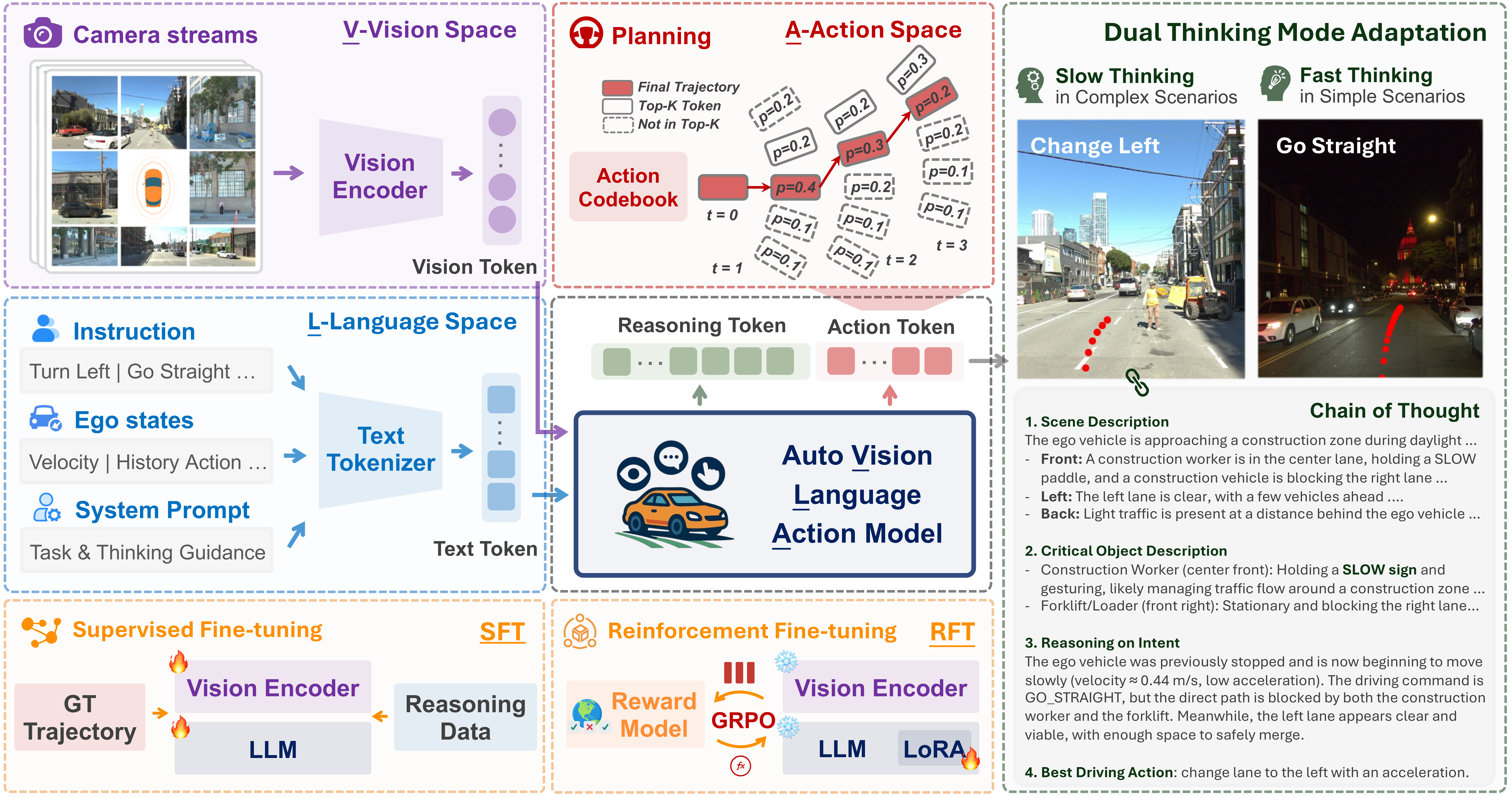
AutoVLA: A Vision-Language-Action Model for End-to-End Autonomous Driving with Adaptive Reasoning and Reinforcement Fine-Tuning
Zewei Zhou*, Tianhui Cai*, Seth Z. Zhao, Yun Zhang, Zhiyu Huang, Bolei Zhou, Jiaqi Ma
| |

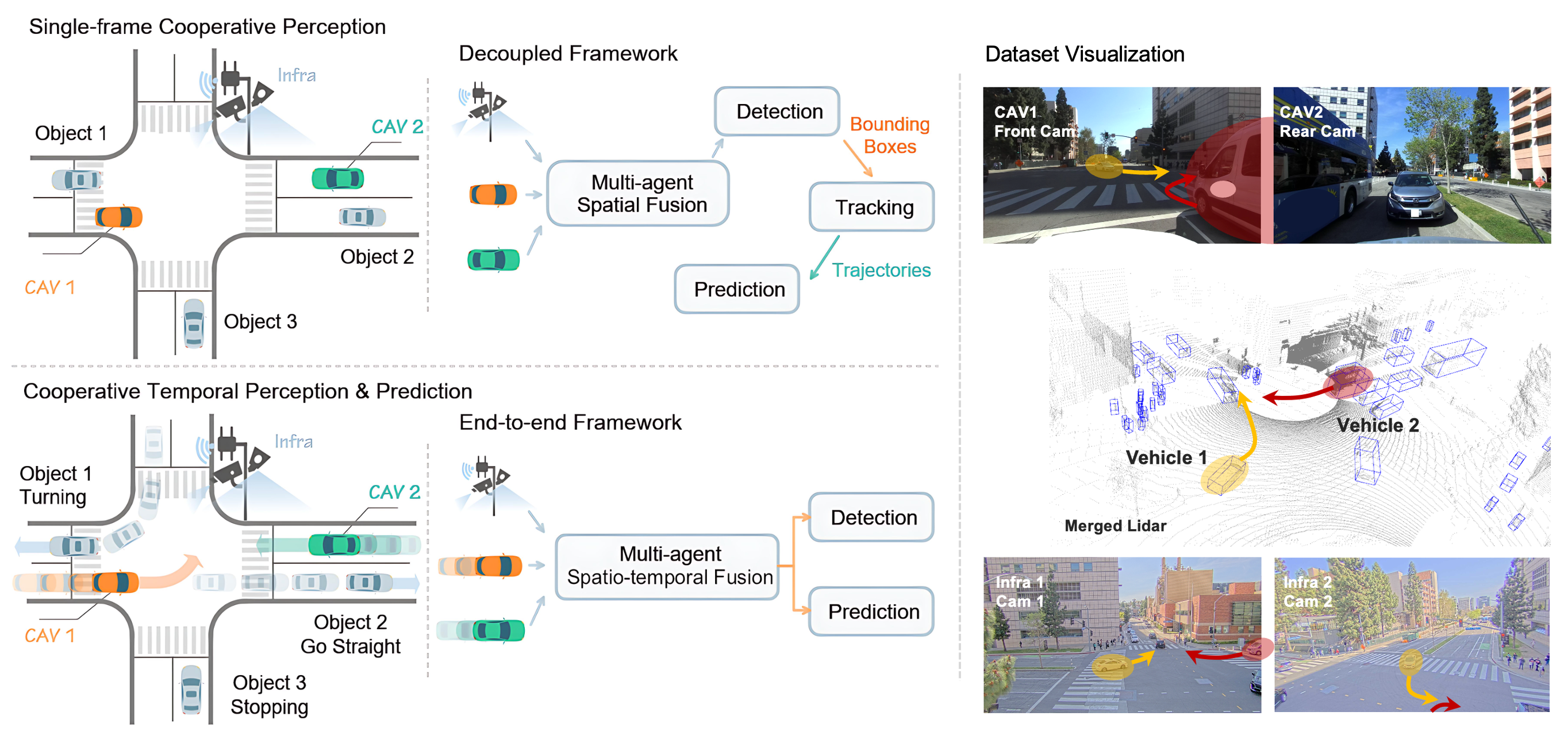
V2XPnP: Vehicle-to-Everything Spatio-Temporal Fusion for Multi-Agent Perception and Prediction
Zewei Zhou, Hao Xiang, Zhaoliang Zheng, Seth Z Zhao, Mingyue Lei, Yun Zhang, Tianhui Cai, Xinyi Liu, Johnson Liu, Maheswari Bajji, Xin Xia, Zhiyu Huang, Bolei Zhou, Jiaqi Ma
Best Paper Award, ICCV 2025 DriveX Workshop
| |

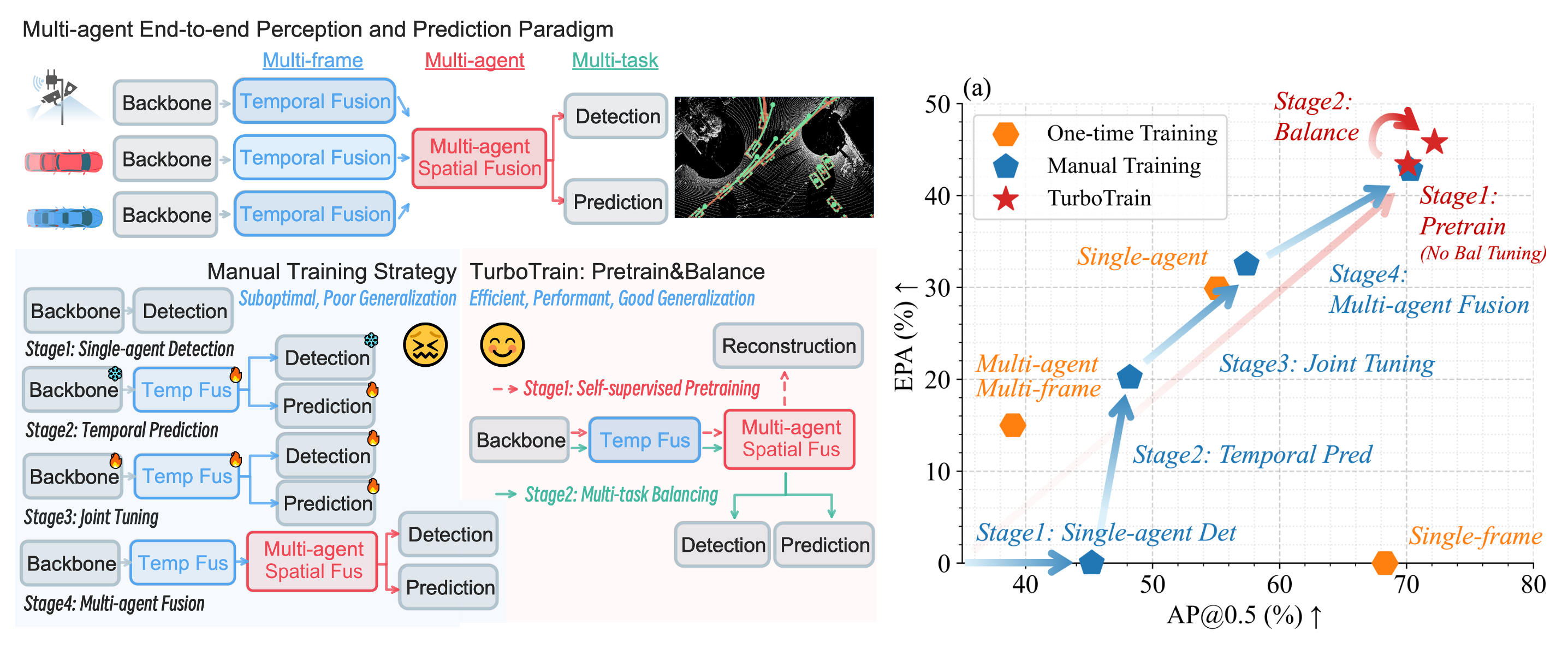
TurboTrain: Towards Efficient and Balanced Multi-Task Learning for Multi-Agent Perception and Prediction
Zewei Zhou*, Seth Z. Zhao*, Tianhui Cai, Zhiyu Huang, Bolei Zhou, Jiaqi Ma
| |

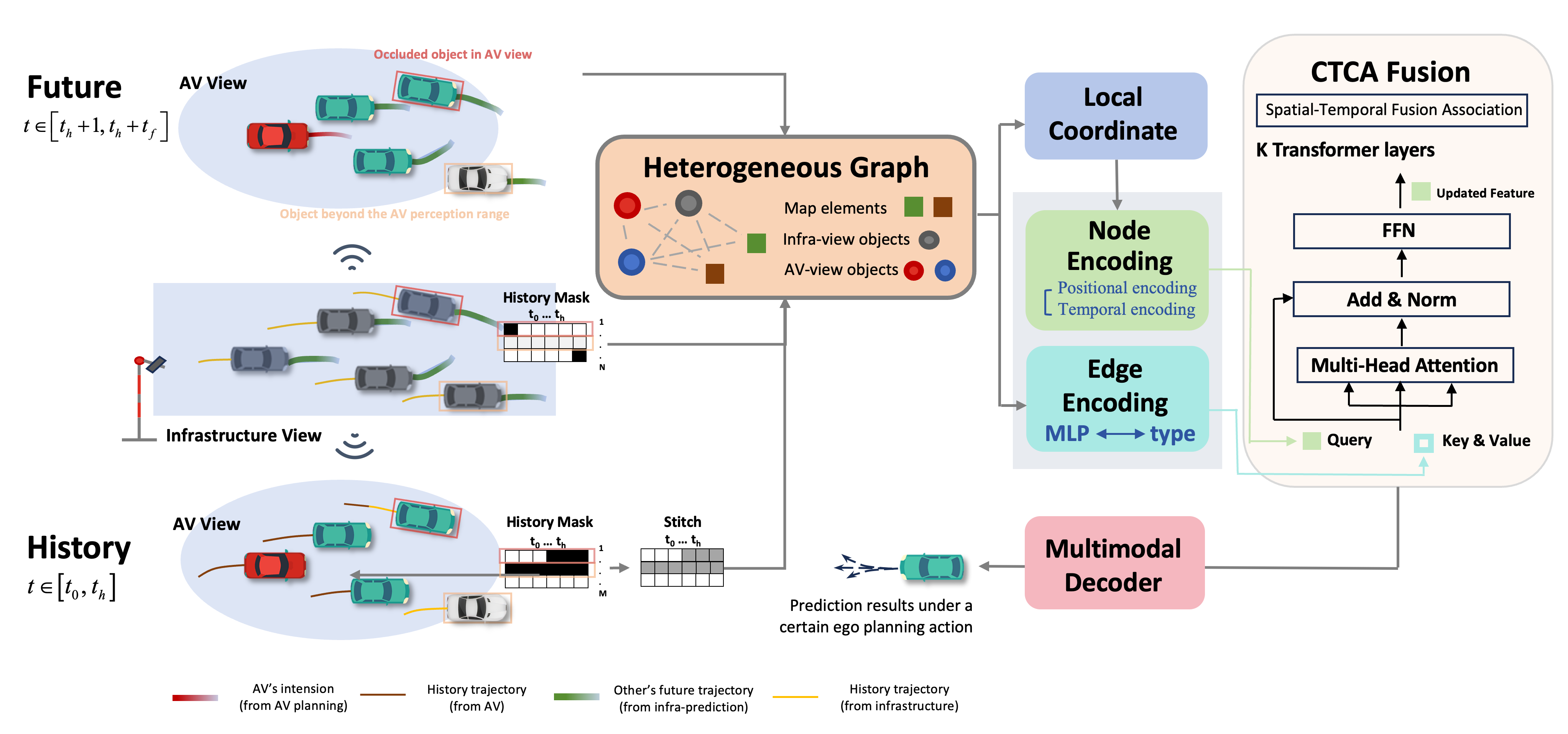
Co-MTP: A Cooperative Trajectory Prediction Framework with Multi-Temporal Fusion for Autonomous Driving
Xinyu Zhang*, Zewei Zhou*, Zhaoyi Wang, Yangjie Ji, Yanjun Huang, Hong Chen
| |

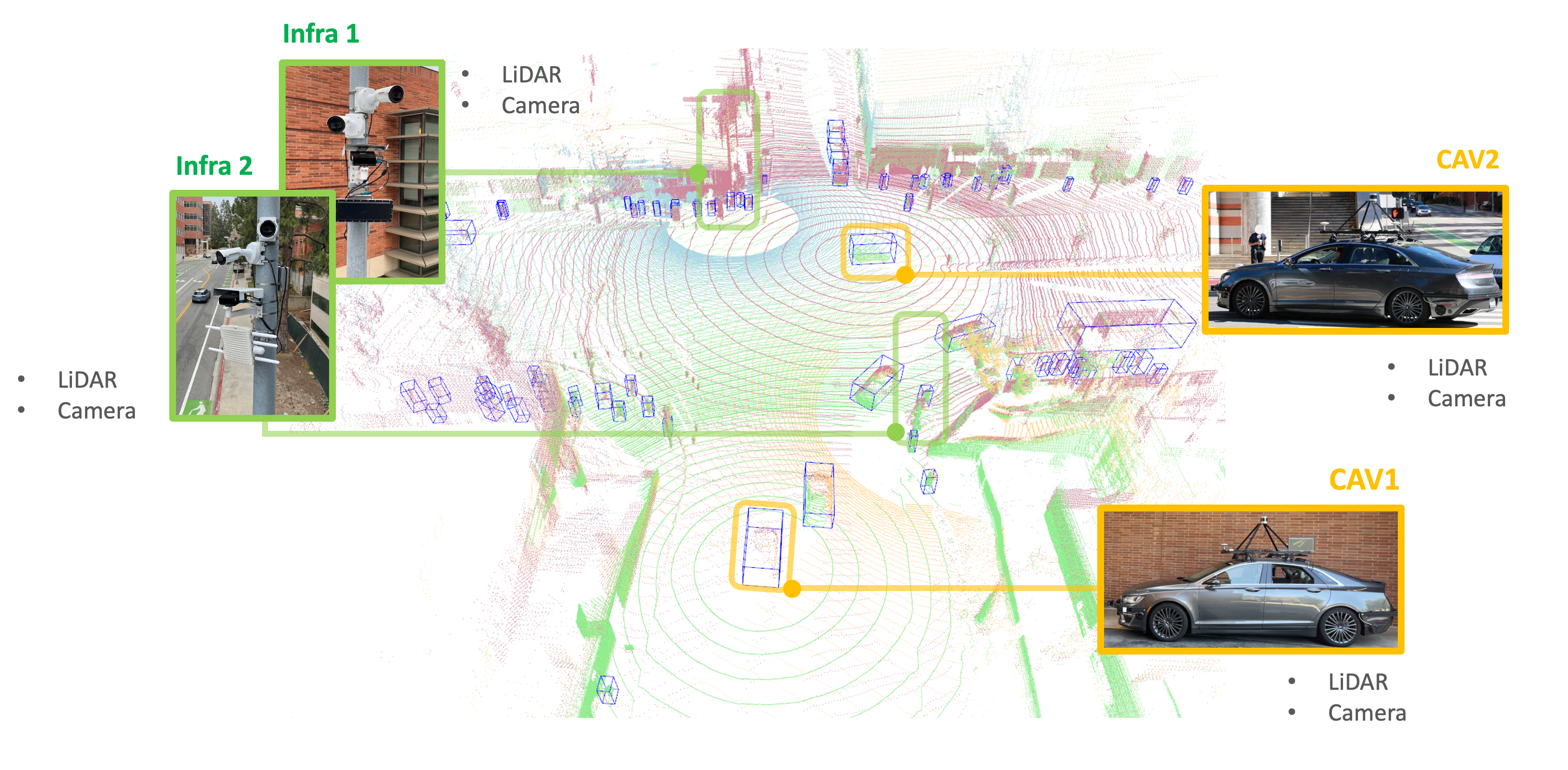
V2X-Real: a Large-Scale Dataset for Vehicle-to-Everything Cooperative Perception
Hao Xiang, Zhaoliang Zheng, Xin Xia, Runsheng Xu, Letian Gao, Zewei Zhou, Xu Han, Xinkai Ji, Mingxi Li, Zonglin Meng, Jin Li, Mingyue Lei, Zhaoyang Ma, Zihang He, Haoxuan Ma, Yunshuang Yuan, Yingqian Zhao, Jiaqi Ma
| |

📖 Educations
- 2023.09 - Now, Ph.D.
 University of California, Los Angeles (UCLA), U.S.
University of California, Los Angeles (UCLA), U.S. - 2020.09 - 2023.06, M.S.
 Tongji University (Tongji), Shanghai, China (Test Waiver Admission)
Tongji University (Tongji), Shanghai, China (Test Waiver Admission) - 2016.09 - 2020.06, B.Eng.
 Chongqing University (CQU), Chongqing, China (Outstanding Graduate,Top 1%)
Chongqing University (CQU), Chongqing, China (Outstanding Graduate,Top 1%)
🎖 Honors and Awards
- 2025.10 Best Paper Award, ICCV 2025 DriveX Workshop
- 2025.10 NeurIPS 2025 Scholar Award
- 2025.09 Amazon AI PhD Fellowship
- 2025.01 Tier 1 Winner of U.S. DOT Intersection Safety Challenge with a $750k award
- 2024.08 Best Paper Award for Outstanding Survey, IEEE T-IV
- 2023.06 Shanghai Outstanding Graduate (Top 1%)
- 2022.11 Weichai Scholarship (Top 2%)
- 2021.09 Tongji Outstanding Master’s Scholarship
- 2019.09 Gratitude to Scientists Scholarship (Highest scholarship in CQU, Top 0.2%)
- 2018.09 National Scholarship, China (Top 1%)
📚 Academic Services
Organizer:
- Organizer of DriveX Workshop on Foundation Models for V2X-Based Cooperative Autonomous Driving in CVPR 2026, CVPR 2025 and ICCV 2025.
- Organizer of Tutorial on Beyond Self-Driving: Exploring Three Levels of Driving Automation at ICCV 2025.
Conference Reviewer:
- IEEE / CVF Computer Vision and Pattern Recognition (CVPR)
- Conference on Neural Information Processing Systems (NeurIPS)
- AAAI Conference on Artificial Intelligence (AAAI)
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE Intelligent Vehicles Symposium (IV)
- IEEE Intelligent Transportation Systems Conference (ITSC)
Journal Reviewer:
- International Journal of Computer Vision (IJCV)
- IEEE Robotics and Automation Letters (RA-L)
- IEEE Transactions on Intelligent Transportation Systems (T-ITS)
- IEEE Transactions on Intelligent Vehicles (T-IV)
🏓 Miscellaneous
- I am a big fan of guitar, especially Fingerstyle. My favorite acoustic guitarist is Satoshi Gogo. I also enjoy playing ping pong and badminton.
- I enjoy graphic design, and designed the logo for the Joint Lab SFVGL of Tongji University and University of Cambridge.